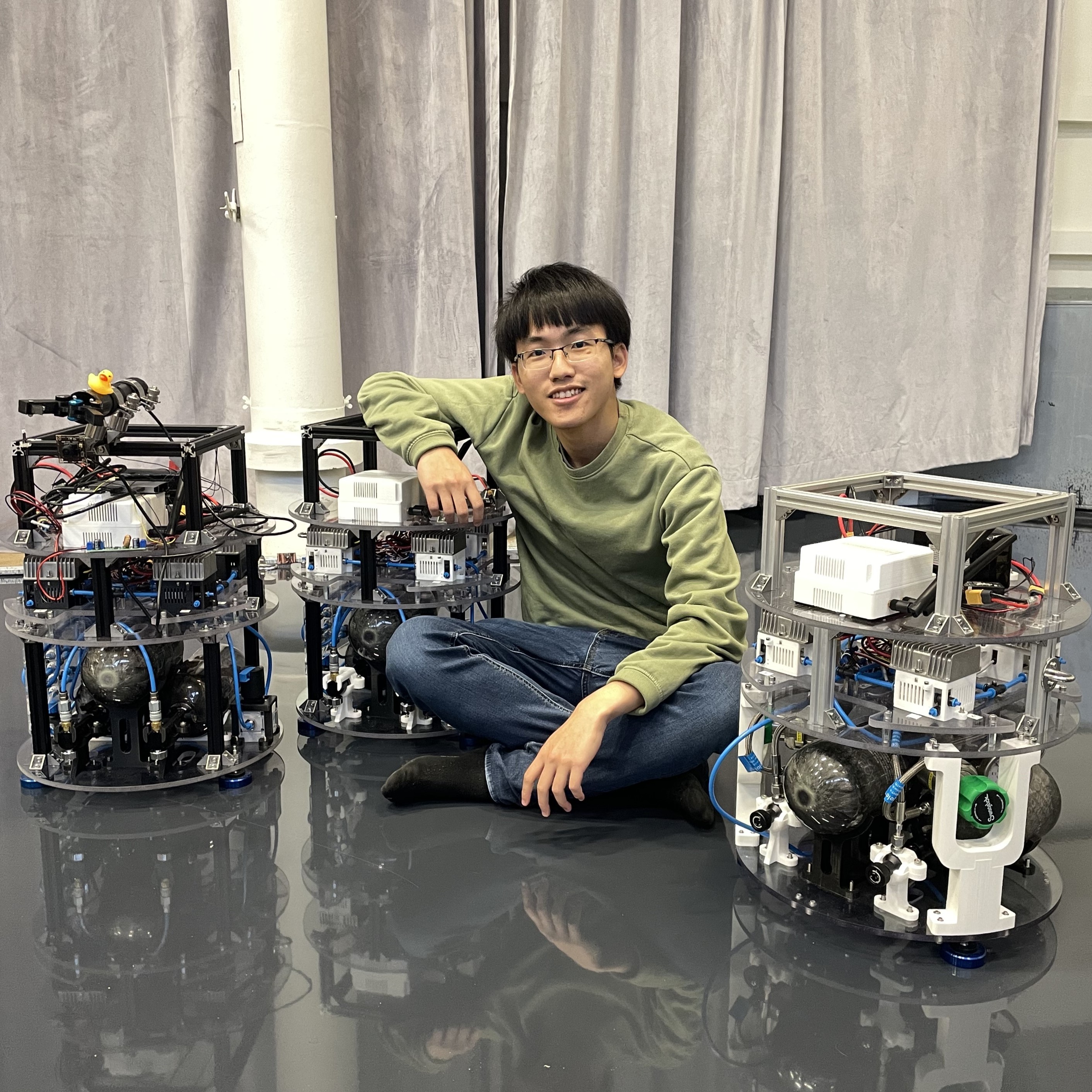
 With my robots at KTH Space Robotics Lab in Stockholm, Sweden.
With my robots at KTH Space Robotics Lab in Stockholm, Sweden.
Hi, I'm Sujet Phodapol — a control and mechanical engineer from Thailand, currently working as a Robotics Control Engineer at Nio Robotics in Toulouse, France.
My passion lies at the intersection of control theory and mechanical design, where I strive to create innovative solutions for complex robotic systems — especially in areas like optimization-based control, space and legged robotics, and complex mechanical and actuator design. To learn more about my research and ongoing work, feel free to visit my publications and projects, or see my CV.
I'm always eager to connect with like-minded people and explore new opportunities in the field of robotics. Whether you're curious about my work, interested in collaboration, or just want to chat about robots — feel free to reach out at sujet [dot] ph [at] gmail [dot] com.
My passion lies at the intersection of control theory and mechanical design, where I strive to create innovative solutions for complex robotic systems — especially in areas like optimization-based control, space and legged robotics, and complex mechanical and actuator design. To learn more about my research and ongoing work, feel free to visit my publications and projects, or see my CV.
I'm always eager to connect with like-minded people and explore new opportunities in the field of robotics. Whether you're curious about my work, interested in collaboration, or just want to chat about robots — feel free to reach out at sujet [dot] ph [at] gmail [dot] com.
Education

KTH Royal Institute of Technology
Master of Science (M.Sc.) – Systems, Control, and Robotics
Sep 2021 - Nov 2023, Stockholm, Sweden
Master of Science (M.Sc.) – Systems, Control, and Robotics
Sep 2021 - Nov 2023, Stockholm, Sweden
- Grade: 5.0/5.0
- Master's Thesis: "Predictive controllers for load transportation in microgravity environments"
Supervised by Pedro Roque and Prof. Dimos V. Dimarogonas.
ETH Zürich
Master of Science (Exchange) – Robotics, Systems and Control
Sep 2022 - Feb 2023, Zürich, Switzerland
Master of Science (Exchange) – Robotics, Systems and Control
Sep 2022 - Feb 2023, Zürich, Switzerland
- Semester thesis: "Data‑driven adaptive control: a geometric approach" at Automatic Control Laboratory,
Supervised by Alberto Padoan and Jeremy Coulson. - Semester thesis: "Design Optimization for Serial Elastic Actuators on Quadrupedal Robots" at Robotic Systems Lab
Supervised by Fabian Tischhauser and Filip Bjelonic.
Chulalongkorn University
Bachelor of Engineering (B.E.) – Mechanical Engineering
Aug 2016 - May 2020, Bangkok, Thailand
Bachelor of Engineering (B.E.) – Mechanical Engineering
Aug 2016 - May 2020, Bangkok, Thailand
- Grade: 3.96/4.00, First-Class Honors, Gold Medal
- Senior project: "An Agile Quadruped Robot"
Supervised by Prof. Viboon Sangveraphunsiri.