Projects
2022
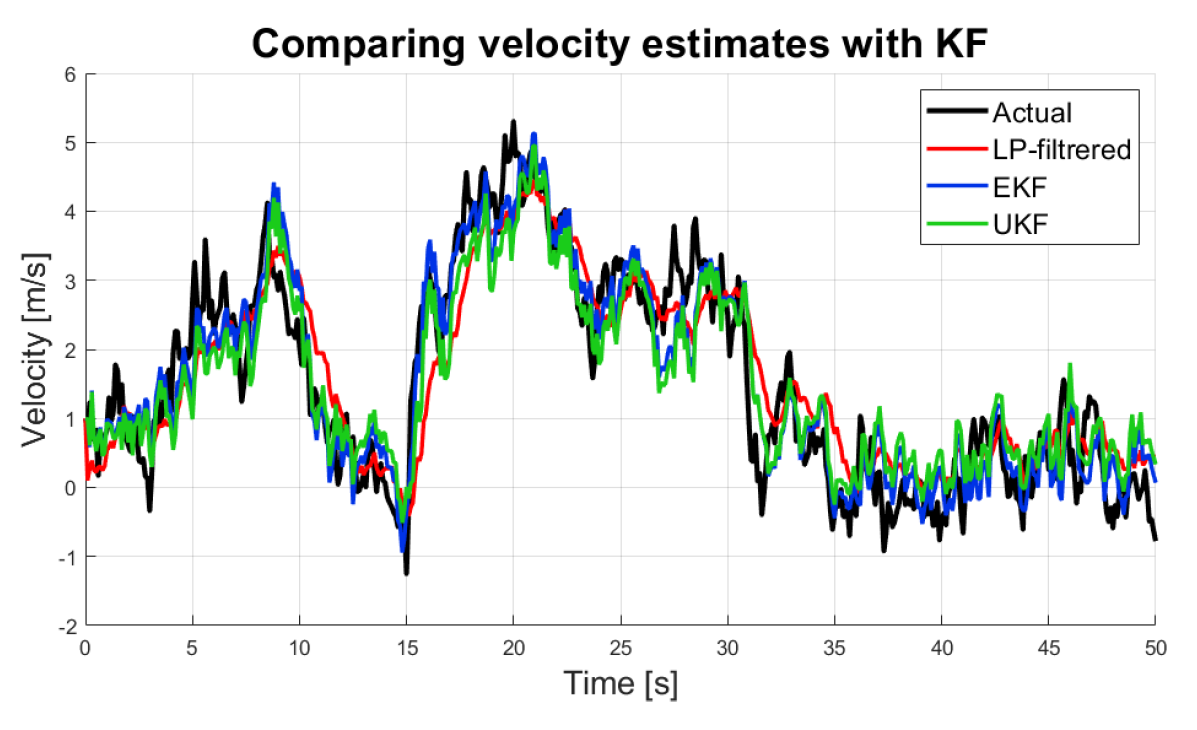
State Estimation of Pipe Inspection Gauge using EKF and UKF
This was the final project for the "Applied Estimation (EL2320)" at KTH. In a group of two, we implemented an Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) to estimate the state of a pipe inspection gauge. We compared the performance of both filters in terms of error in various scenarios, including slipping of the wheels.
2021
Behavior tree for service robot (TIAGo robot)
This was the final project for the "Introduction to Robotics (DD2410)" course at KTH. In a team of two, we developed a behavior tree to automate the transportation tasks of a service robot, integrating localization and navigation within ROS.
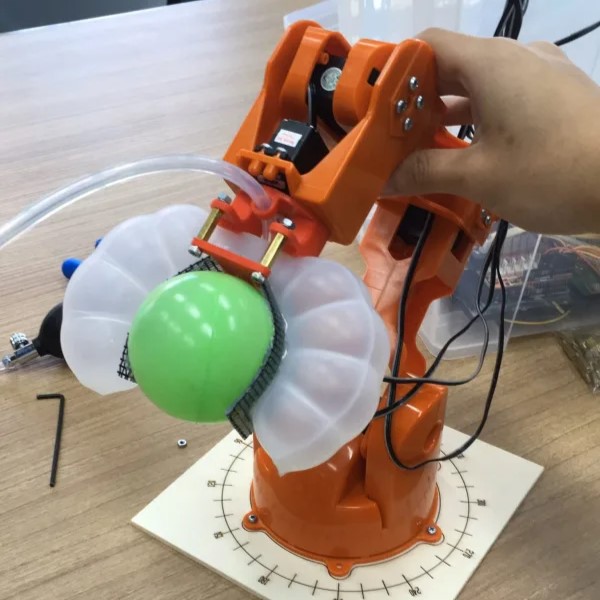
Soft robots
This was my first time working with soft robots, where I developed a soft robotic gripper using a 3D printer and silicone. The gripper was capable of grasping objects of various shapes and sizes.
2020
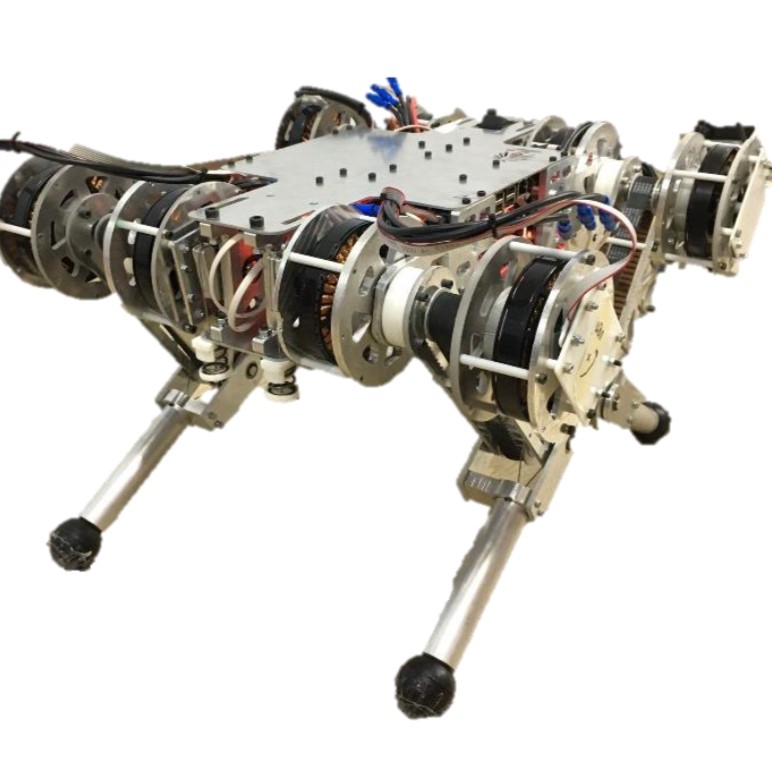
An Agile Quadruped Robot (Bachelor's thesis)
This was my bachelor’s thesis project. In a team of three, we designed and prototyped a quadruped robot with 8 degrees of freedom, incorporating series elastic actuators (SEA) for compliant movement. We implemented feedback control to enable two locomotion gaits: walking and trotting.
2019

Droideka
This was one of my most complicated CAD projects, where I designed a droideka from Star Wars using CATIA V5R21. The droideka was designed to be fully functional with 36 degrees of freedom, with an ability to transform from a rolling mode to a standing mode.
Automated storage and retrieval system
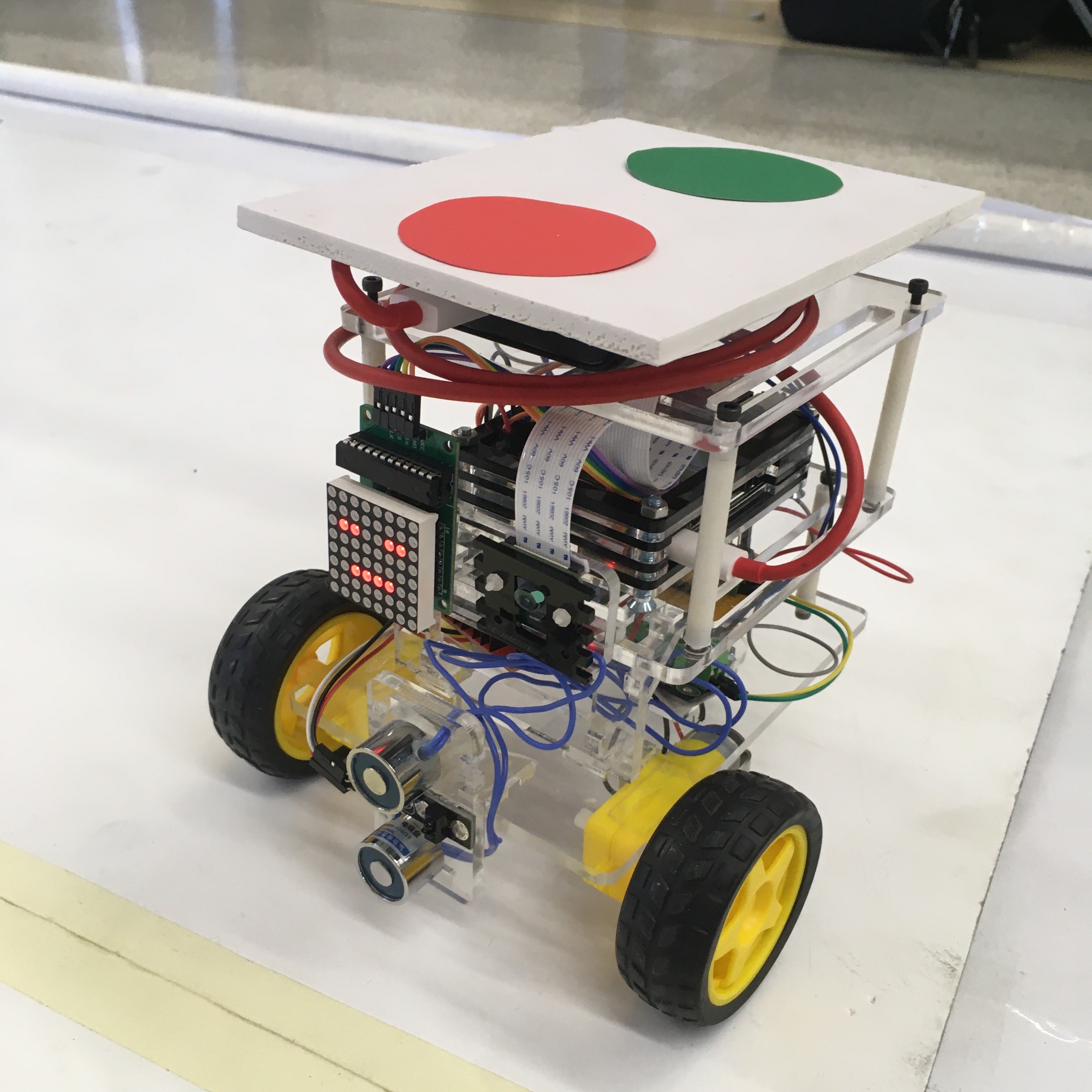
This was the final project for the "Internet of Things (2147336)" course at Chulalongkorn University. In a team of two, we developed a prototype for an industrial transportation system using Raspberry Pi, created an IoT cloud platform for communication between the robot and control room, and implemented a localization system with a bird’s-eye view camera to track the robot’s position.

Motion sensor controller for quadrupedal robot
This was the mid-term project for the "Internet of Things (2147336)" course at Chulalongkorn University. In a team of two, we developed a motion sensor controller for a quadrupedal robot using an IMU sensor and STM32, created a 3D-printed prototype, and enabled remote control via Bluetooth.

Neural Control for Hexabot (Internship)
This was part of my internship at BRAIN Lab, Vidyasirimedhi Institute of Science and Technology (VISTEC), where I developed a neural controller based on Central Pattern Generators (CPG) for a hexapod robot, enabling it to walk in all directions.
Dynamics and control of a three-degree-of-freedom scalar robot
This was the final project for the "Applied Dynamics (2103496)" course at Chulalongkorn University. In a team of two, we derived the equations of motion for a three-degree-of-freedom scalar robot, developed a MATLAB simulation using SimMechanics to model its motion, and created a controller based on manipulator equations to control the robot's position.
2018

Smart Agricultural Robot Contest 2018
This was my final robotics competition during my bachelor's degree, where my team developed an agricultural robot capable of autonomously detecting and picking ripe mangoes. I was responsible for designing the robot's elevator system, utilizing belts, pulleys, and a DC motor. We were the only team to complete the task autonomously and won first place in the fisrt round. Unfortunately, a malfunction in the coupling system caused our robot to fail in the final round.

Unmanned aerial vehicle
This was my first experience with fixed-wing UAVs, where we designed and built a UAV capable of autonomous flight. I was responsible for designing the delivery system, incorporating a servo motor, and release mechanism using laser-cutter and 3D printer.
Pipe climbing robot
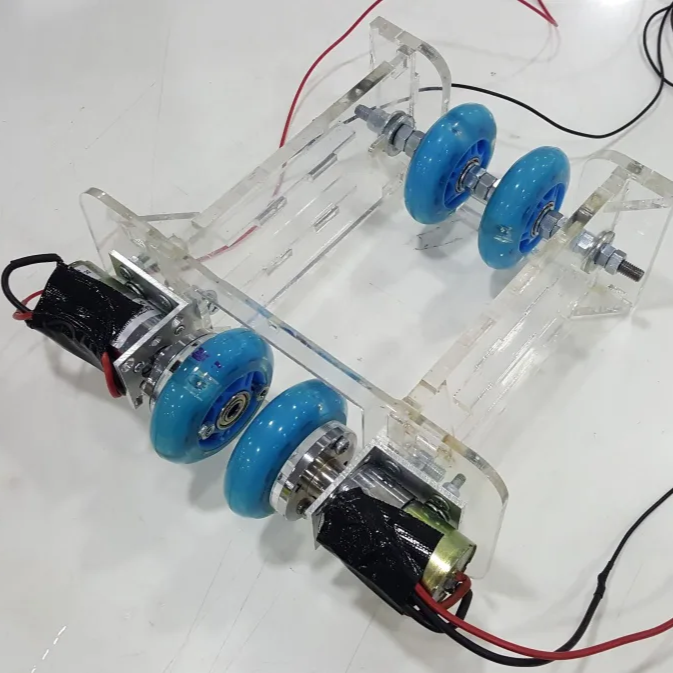
This was the final project for the "Design Methodology for Mechanical Engineering (2103301)" course at Chulalongkorn University. In a team of six, we developed a pipe-climbing robot capable of ascending a U-shaped pipe. I designed the climbing mechanism, incorporating a spring to adjust the robot’s size, allowing it to pass through the pipe’s connector.

Pneumatic claw machine
This was an outsourced project from a pneumatic company, where they requested a claw machine to showcase their suction cups and pneumatic components. We designed the claw machine to be fully actuated by the pneumatic system, incorporating a suction cup, pneumatic cylinder, and solenoid valve.
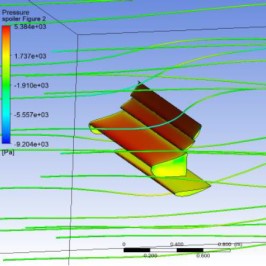
Design and development of Formula 1 rear wing using CFD
This was a final project for the "Computer-Aided Mechanical Engineering Design (2103306)" course at Chulalongkorn University. In a team of two, we designed and optimized a Formula 1 rear wing using ANSYS to achieve the highest downforce.
Animal Locomotion Analysis
This was the final project for the "Mechanics of Machinery (2103322)" course at Chulalongkorn University. In a team of three, we analyzed the locomotion of a basilisk lizard using MATLAB and Simulink, optimizing the length of each link to accurately replicate the lizard’s movement.
2017

PLC competition 2017
This was my first award-winning robotics competition, where my team developed a basketball-shooting robot capable of detecting, collecting, and shooting balls. I designed the collection and shooting systems using CAD, incorporating a rail guide, pneumatic gripper, lift, and dual spinning wheels. After a tough competition, we reached the semi-finals and finished 2nd runner-up, losing to the champion.

SEACON WAR OF STEEL 2
This was my first robotics competition, where I collaborated with my senior to design and build a fighting robot equipped with a spinning drum. I was responsible for designing and fabricating the weapon and shield using hand tools and machines such as a lathe and band saw. We won the first match but were eliminated in the second round.