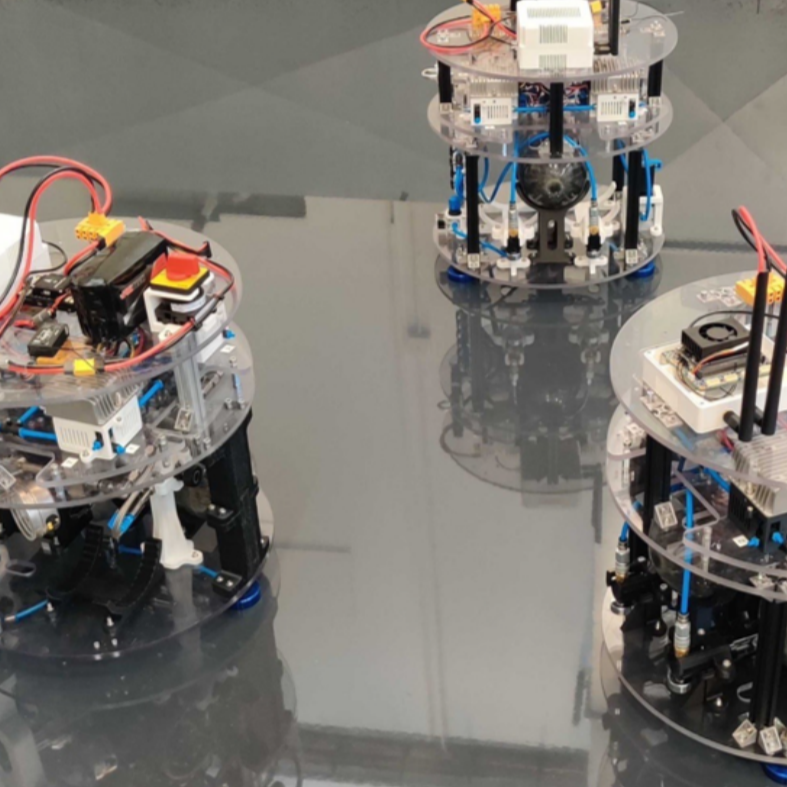
P. Roque, S. Phodapol, E. Krantz, J. Lim, J. Verhagen, F. J. Jiang, D. Dörner, H. Mao, G. Tibert, R. Siegwart, I. Stenius, J. Tumova, C. Fuglesang, and D. V. Dimarogonas, “Towards Open-Source and Modular Space Systems with ATMOS,” submitted to IEEE Transactions on Field Robotics, 2025.
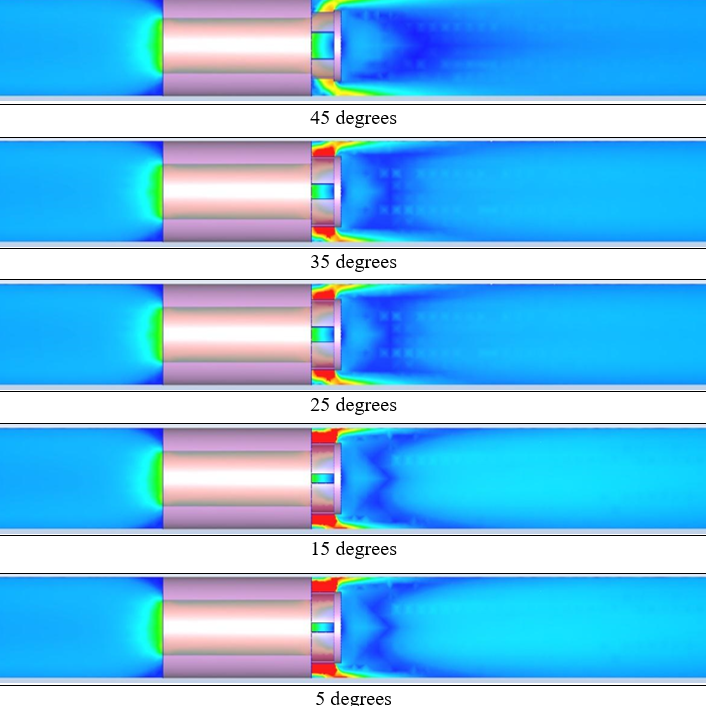
T. Suthisomboon, S. Phodapol, T. Pairam, K. Phongaksorn, N. Asawalertsak, P. Kriengkomol, T. Jitnaknan, P. Janbanjong, and P. Manoonpong, “ Morphological Adaptation for Speed Control of Pipeline Inspection Gauges: From System Integration to Real-World Demonstration ,” in IEEE/SICE International Symposium on System Integration (SII 2025), München, Germany, 2025.
Winner of the SICE International Young Authors Award (SIYA)
S.A. Deka, S. Phodapol, A.M. Gimenez, V.N. Fernandez-Ayala, R. Wong, P. Yu, X. Tan, D.V. Dimarogonas “Enhancing Precision Agriculture Through Human-in-the-Loop Planning and Control,” in IEEE 20th International Conference on Automation Science and Engineering (CASE 2024), Bari, Italy, 2024.
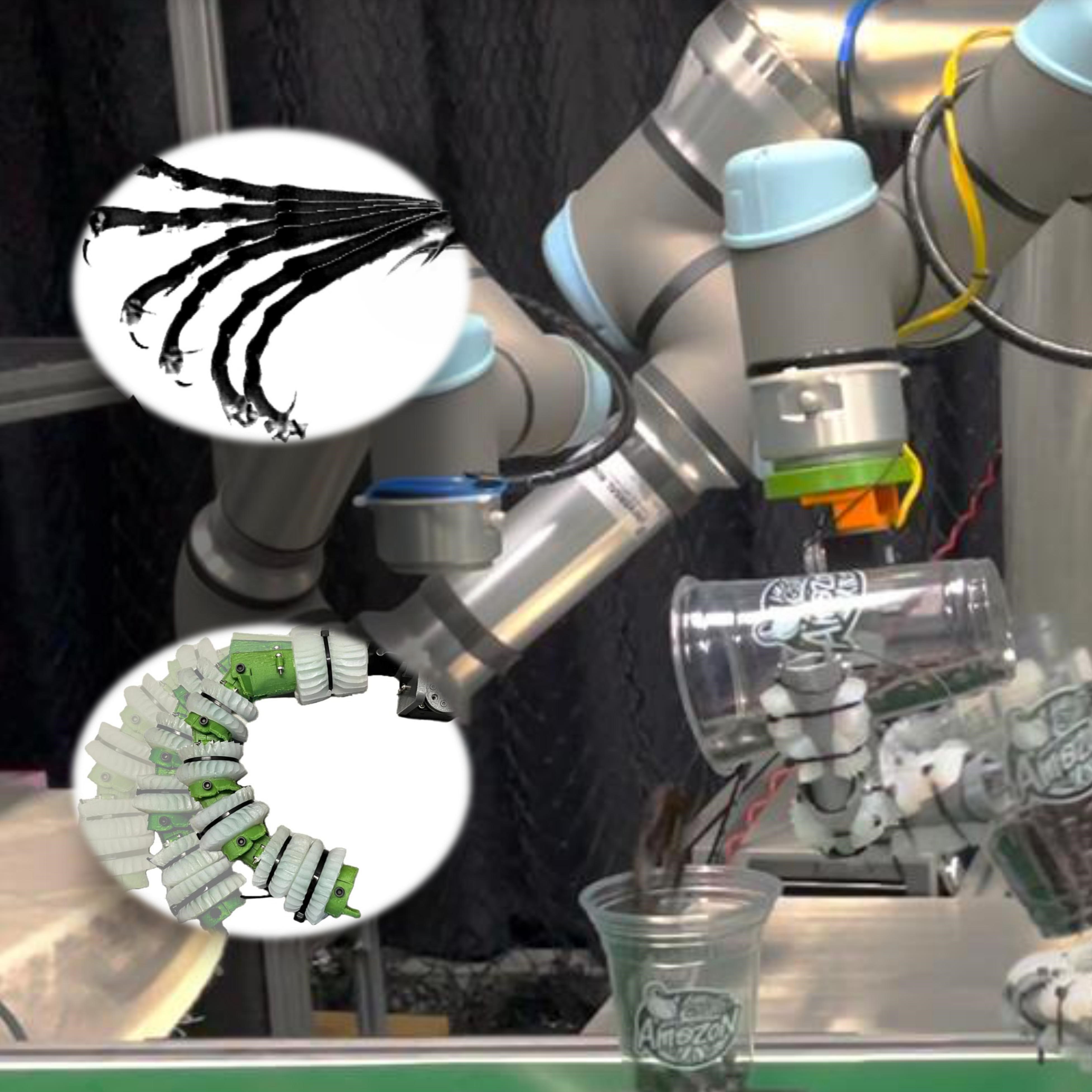
S. Phodapol, A. Harnkhamen, N. Asawalertsak, S.N. Gorb, P. Manoonpong, “Insect tarsus-inspired compliant robotic gripper with soft adhesive pads for versatile and stable object grasping,” in IEEE Robotics and Automation Letters (RAL 2023), vol. 8, no. 5, pp. 2486-2493, Detroit, USA, 2023.
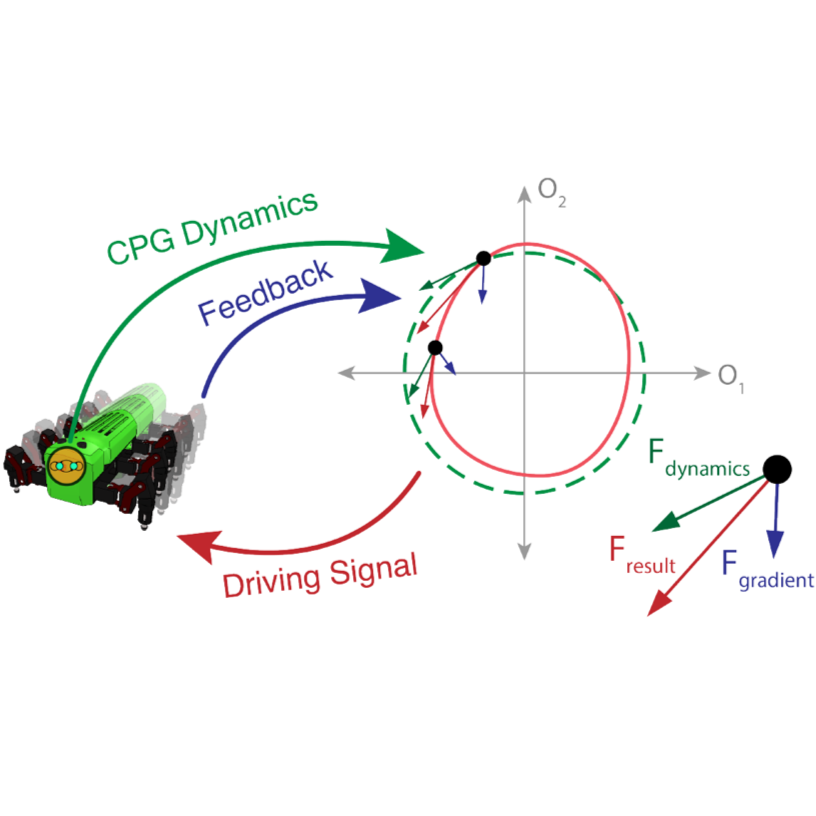
S. Phodapol, T. Chuthong, B. Leung, A. Srisuchinnawong, P. Manoonpong and N. Dilokthanakul, "GRAdient-Based Shape-Adaptive Locomotion Control,” in IEEE Robotics and Automation Letters (RAL 2022), vol. 7, no. 2, pp. 1087-1094, Philadelphia, USA, 2022.
S. Phodapol, T. Suthisomboon, P. Kosanunt, R. Vongasemjit, P. Janbanjong, P. Manoonpong, "Morphological Adaptation for Speed Control of Pipeline Inspection Gauges (MC-PIG)," The Abu Dhabi International Petroleum Exhibition and Conference (ADIPEC), Abu Dhabi, UAE, 2021.
S. Phodapol, Y. Pibulwarangkur, C. Janyakhantikul, "An Agile Quadruped Robot,” Bachelor’s thesis, Chulalongkorn University, Bangkok, Thailand, 2020.
Supervisor: Prof. Viboon Sangveraphunsiri.